가장 신경쓰이는 케이블링부터 해보았다.
케이블링을 잘 모르기에 온라인 사례를 참고했다.(https://projecthub.arduino.cc/Little_french_kev/face-tracking-camera-f391e1)
먼저 기성 9볼트 어댑터에서 전원을 받기에 9볼트 잭의 양극과 음극을 5볼트 레귤레이터로 연결시켜준다. 양극은 따로 빼서 아두이노 기판으로.
음극 또한 빼서 서보모터 두개와 아두이노로 각각 연결시켜보내줬으며 레귤레이터의 다른 다리는 서보모터 두개에 연결시켜 전원을 주었다. 직접 아두이노에 장착하는 것보다는 이렇게 별도의 전원을 연결하는 것이 안정적인 전원 수급이 가능할 듯 하다.
아두이노의 신호선 두개를 빼서 서보에 연결하면 완료.

이후 레고 테크닉 부속을 이용해 대략적인 몸체를 만들고 서보마운트와 웹캠을 장착했다.
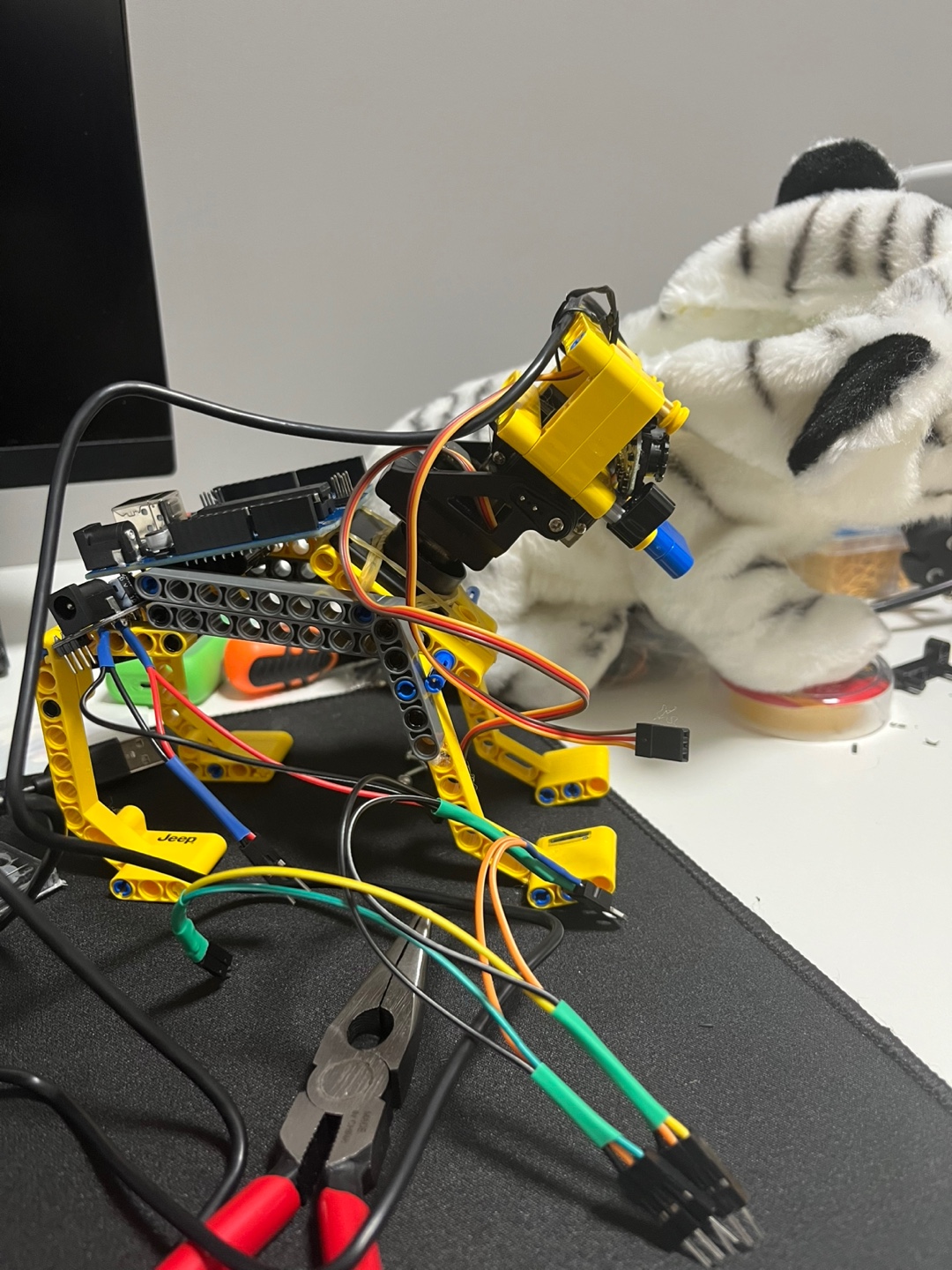
인형의 머리가 몸에 붙어있는 상태로는 충분한 가동각을 얻을 수 없기에 머리는 분리하기로 했다.
'Project Log > [Toy Project]Tiger-Bot' 카테고리의 다른 글
| [Toy Project]Tiger-Bot 만들기 - Face Recognition (0) | 2025.03.22 |
|---|---|
| [Toy Project]Tiger-Bot 만들기 - Talking [1] (0) | 2025.02.25 |
| [Toy Project]Tiger-Bot 만들기 - 몸체 (0) | 2025.02.24 |
| [Toy Project]Tiger-Bot 만들기 - 코드 (0) | 2025.02.24 |
| [Toy Project] Tiger-Bot 만들기 - 구상 (0) | 2025.02.24 |